at 1920x1080, you are cropping the image from it's native 4K. Less effective pixels allow for the higher frame rateDid anyone notice the 120FPS video option in 1920x1080? I did a quick test and it looked good but does crop the image.


You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
1.6 YAFU (Yet Another Firmware Update)
- Thread starter damoncooper
- Start date
What are your Mod values for the compass, if they are within the acceptable range, then you can rule that out. Recalibrating won't assure you are calibrated... Only actually checking the values being in rangeFlown about 6 times and do a compass recalibrate every time at the pre-flight check because of the problem!
Is there anything else with regards to compass i can do? To get this sorted?
- Joined
- Jul 6, 2014
- Messages
- 696
- Reaction score
- 290
I think you are on the right track with your comment, but your language isn't specific enough for my tastes.at 1920x1080, you are cropping the image from it's native 4K. Less effective pixels allow for the higher frame rate
First, let's look at the GH4 sensor, which has the same dimensions as the X5:
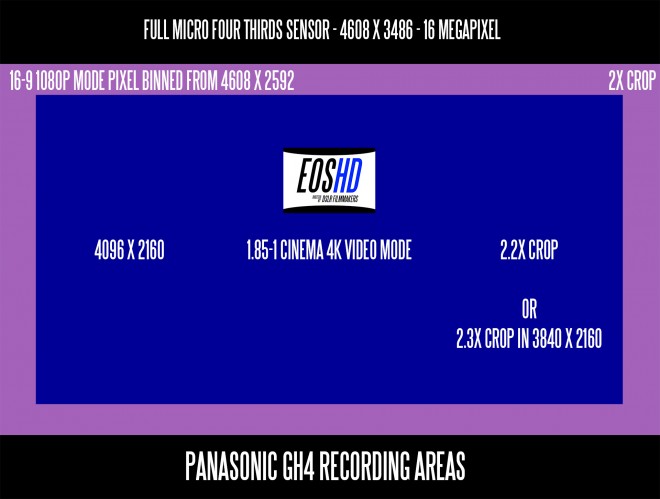
Note the magenta rectangle; this is the part of the sensor that the X5 uses when filming 1,920 x 1,080 at 24, 25, and 30 frames/second. It is 4,608 pixels by 2,592 pixels. The video processor samples this area of the sensor, combines the pixels into a 1,920 x 1,080 image (this is called "pixel-binning"), then sends that image to the H.264 compressor.
That works fine up to 30 frames/second, but the video processor simply can't do all of that at 120 frames/second. It doesn't have enough bandwidth to read that much data from the sensor 120 times/second, then pixel-bin the images into a 1,920 x 1,080 image, then compress that frame.
So instead, when filming at 120 frames/second, the camera does not sample the entire magenta (4,608 x 2,592) area of the sensor. Instead, it samples a much smaller area, 1,920 by 1,080 pixels, at the center of the sensor. It then does not have to do any pixel-binning, as the image is already the final size; it just sends the data to the H.264 compressor.
Two bad things happen as a result:
- Because fewer pixels on the sensor are used, the quality of the image is decreased significantly
- The field of view is narrowed dramatically.
- Joined
- Aug 13, 2015
- Messages
- 23
- Reaction score
- 2
- Age
- 59
Can you point me to what they "should" be?What are your Mod values for the compass, if they are within the acceptable range, then you can rule that out. Recalibrating won't assure you are calibrated... Only actually checking the values being in range
- Joined
- Mar 14, 2015
- Messages
- 17
- Reaction score
- 5
- Age
- 52
- Joined
- Jun 19, 2015
- Messages
- 361
- Reaction score
- 26
In the release notes it says:
"1. In cold environments, propulsion output is automatically adjusted based on battery temperature and cell voltage.
Horizontal and vertical speed is also decreased to avoid triggering battery protection."
So is this decreased speed only in regards to what is said above, i.e. in cold weather. or is it a overall speed decrease?
And if one hasn't updated to 1.5 yet but are currently on 1.4 can one update directly to 1.6 or do i need to update to 1.5 first and then to 1.6?
"1. In cold environments, propulsion output is automatically adjusted based on battery temperature and cell voltage.
Horizontal and vertical speed is also decreased to avoid triggering battery protection."
So is this decreased speed only in regards to what is said above, i.e. in cold weather. or is it a overall speed decrease?
And if one hasn't updated to 1.5 yet but are currently on 1.4 can one update directly to 1.6 or do i need to update to 1.5 first and then to 1.6?
Regarding the issue with satellites after upgrading firmware this could be due to th gps needing to obtain a new ephemeris and almanac. There could also be some differences in how the app displays the number of satellites? I.e. Number of satellites being tracked versus the number being used in the solution. The gnns is also using the gps and glonass satellites for position and there can be times when the two systems cannot be used together due to ephemeris or clock errors. It would be good if the DJI app let you click the on the satellite icon to see extra detail about the solution, satellites being tracked and used etc.
- Joined
- Nov 7, 2015
- Messages
- 132
- Reaction score
- 31
I think you are on the right track with your comment, but your language isn't specific enough for my tastes.
First, let's look at the GH4 sensor, which has the same dimensions as the X5:
Note the magenta rectangle; this is the part of the sensor that the X5 uses when filming 1,920 x 1,080 at 24, 25, and 30 frames/second. It is 4,608 pixels by 2,592 pixels. The video processor samples this area of the sensor, combines the pixels into a 1,920 x 1,080 image (this is called "pixel-binning"), then sends that image to the H.264 compressor.
That works fine up to 30 frames/second, but the video processor simply can't do all of that at 120 frames/second. It doesn't have enough bandwidth to read that much data from the sensor 120 times/second, then pixel-bin the images into a 1,920 x 1,080 image, then compress that frame.
So instead, when filming at 120 frames/second, the camera does not sample the entire magenta (4,608 x 2,592) area of the sensor. Instead, it samples a much smaller area, 1,920 by 1,080 pixels, at the center of the sensor. It then does not have to do any pixel-binning, as the image is already the final size; it just sends the data to the H.264 compressor.
Two bad things happen as a result:
So while 120 frames/second is a nice feature, it's not very useful. And the compromises made in order to provide it are yet another example of how the underpowered video processor on the X5 is undermining what could and should be an incredible camera.
- Because fewer pixels on the sensor are used, the quality of the image is decreased significantly
- The field of view is narrowed dramatically.
Except that the x5 doesn't have 120fps. Also, it actually crops 1080p 30p and high frame rate recordings at 60p use the full sensor.
The processor has limitations, but DJI's tech team seems to be the limiting factor right now. The 120fps crop on the X3 should help reduce aliasing.
- Joined
- Mar 18, 2015
- Messages
- 452
- Reaction score
- 92
So let me get this straight! We can't fly in P mode to get home in very windy days now? Not enough power?I would caution flying the new FW (1.6.0.40) in strong wind conditions. I was struggling to control mine today in 9-10m/s winds and almost experienced a flyaway. Despite turning into wind and applying full right stick forward I was not able to counter the wind drift in P-GPS mode. I had to reduce height and switch to ATTI to regain control. PS. Air temp was 9C.
I just updated too!
Perhaps we should all go to CES in Vegas next week and complain to the DJI reps who will be there. Unfortunately, we would have better luck when phoning or chatting with tech support as DJI sends only their junior guys to the shows who basically just try to sell you the machines.
I know, I went to an event in Toronto and had no luck with them.
- Joined
- Mar 18, 2015
- Messages
- 452
- Reaction score
- 92
I wonder if using FPV camera and Auto Flight Logic will bypass the new DJI restrictions such as reduced power and Cold batteries.
If I set a new mission in Mission Zplanner for instance, will the Inspire have an issue in windy conditions now?
I wonder if using FPV camera and Auto Flight Logic will bypass the new DJI restrictions such as reduced power and Cold batteries.
If I set a new mission in Mission Zplanner for instance, will the Inspire have an issue in windy conditions now?
I think it's Flight Controller-based, which would mean SDK or not, it's part of the new behavior.
For the record, I guess I'd rather be forced to land in a non-home position than have battery protection kick in and shutdown the aircraft mid flight.
After weighing those options, I've updated to 1.6. Sigh. Need to see what happens on cold weather flight testing now that winter is in the way in New England.
- Joined
- Mar 18, 2015
- Messages
- 452
- Reaction score
- 92
Funny thing is, I updated the cold weather update while vacationing in the hot tropical air of Cairns, Australia.I think it's Flight Controller-based, which would mean SDK or not, it's part of the new behavior.
For the record, I guess I'd rather be forced to land in a non-home position than have battery protection kick in and shutdown the aircraft mid flight.
After weighing those options, I've updated to 1.6. Sigh. Need to see what happens on cold weather flight testing now that winter is in the way in New England.
No issues so far and no wind to speak of. Now in Sydney where the temperature is heading for 100 degrees later this week.
My Inspire must be wondering what cold air is! Lol!
Next stop, Vancouver on New Year's Day. But even Vancouver won't be that bad as it is sub tropical anyway with Palm trees. Yes, palm trees do exist in Canada, my home.
- Joined
- May 30, 2015
- Messages
- 6
- Reaction score
- 0
- Age
- 63
Ed & KilrahAs Kilrah says - DO NOT do a compass calibration before every flight. It is totally unnecessary and runs the risk of introducing errors.
Far more important is to check your mod values at rest immediately before each take off.
What are/were your mod values at this location?
Thanks for your response
To put the record straight I dont normally have too calibrate the compass every time I fly.
I have only taken this tact because of compass error in the last few flights in hope to resolve this.( and now error message saying you should)
Clearly this is not resolving the issue and again I stress that this has only happened since the first flight from upgrading to FW1.6 or is this just coincidence??? Guys can someone confirm that this could be a FW issue?
Ed I attach a screen shot of the IMU values you can see the compass MOD value fluctuates around 1500
I have flown twice again and now get NO SIGNAL errors ? & more COMPASS errors. In and out of control Just to hairy to fly now!
DRanger
Attachments
1500ish seems low.. at least for the past couple of updates.. I remember earlier this year that 1400-1500 was spot on, but the last two, the sweet spot was 1600-1650.
ps.. I have not updated.
ps.. I have not updated.
1500ish seems low.. at least for the past couple of updates.. I remember earlier this year that 1400-1500 was spot on, but the last two, the sweet spot was 1600-1650.
ps.. I have not updated.
I always get between 1400 and 1600. Most times its about 1500. That's been true since I have owned my craft, and after all the updates. And unlike the Editor's suggestions, I always do a compass calibration. But that is a whole other issue that has been discussed in this forum at great length for months. And one last point, I always do an IMU calibration after every firmware update.
- Joined
- Jun 13, 2015
- Messages
- 118
- Reaction score
- 92
- Age
- 49
I always get between 1400 and 1600. Most times its about 1500. That's been true since I have owned my craft, and after all the updates. And unlike the Editor's suggestions, I always do a compass calibration. But that is a whole other issue that has been discussed in this forum at great length for months. And one last point, I always do an IMU calibration after every firmware update.
I used to do compass calibrations pretty constant, but discovered that just checking the mods before liftoff has proved very reliable.. I have started to launch from a couple of spots that were out of whack, I moved a couple hundred feet, and got good readings.... but yes, defiantly compass and IMU after every update... I still have not done 1.6... waiting.
- Joined
- Jun 13, 2015
- Messages
- 118
- Reaction score
- 92
- Age
- 49
- Joined
- Jun 22, 2013
- Messages
- 52
- Reaction score
- 9
Thats what I want to know,
1.4.0.x was awesome, and I am tempted to just down grade back to that....
1. In cold environments, propulsion output is automatically adjusted based on battery temperature and cell voltage. Horizontal and vertical speed is also decreased to avoid triggering battery protection. < I am trying to know if this is for any temperature or just cold weather?
1.4.0.x was awesome, and I am tempted to just down grade back to that....
1. In cold environments, propulsion output is automatically adjusted based on battery temperature and cell voltage. Horizontal and vertical speed is also decreased to avoid triggering battery protection. < I am trying to know if this is for any temperature or just cold weather?
i will wait this one out ") still on 1.4
still on 1.4
problem is they put in other good features next to the idiot feature ones and this manes it hard to descide
what if i have to chase down a rally car in cold sub 5 degrees? they go 50-80 at times and then i need to switch. i never go with cold batteries. question is if it will trigger this saftey thing then too?
Sent from my iPhone using Tapatalk
still on 1.4 problem is they put in other good features next to the idiot feature ones and this manes it hard to descide
what if i have to chase down a rally car in cold sub 5 degrees? they go 50-80 at times and then i need to switch. i never go with cold batteries. question is if it will trigger this saftey thing then too?
Sent from my iPhone using Tapatalk
Similar threads
- Replies
- 3
- Views
- 894
- Replies
- 3
- Views
- 349
- Replies
- 3
- Views
- 799
- Sticky
- Replies
- 1
- Views
- 1K
- Replies
- 3
- Views
- 876



